,它们解决的是两类不同的不确定性问题,建立在不同的测量假设之上,也因此各自成立◇、各自受限。
2、传播路径不确定性蒸汽○、粉尘◁、压力变化、罐内结构-,使信号传播过程变得不可预测
3☆◇★、传感器状态不确定性结露、挂料★◇、结晶■、老化,改变传感器自身的◇■○“工作边界条件”
导波雷达与雷达液位计的根本差异,并不在于谁更先进,而在于它们把不确定性…▲,放在了完全不同的位置。
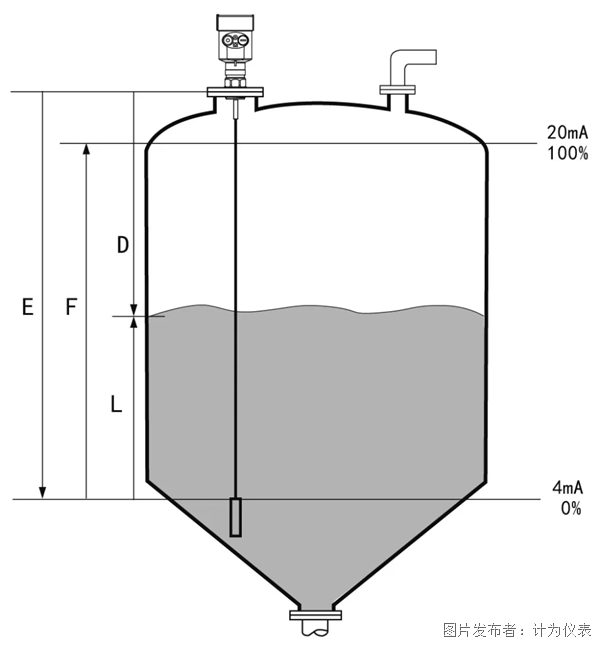
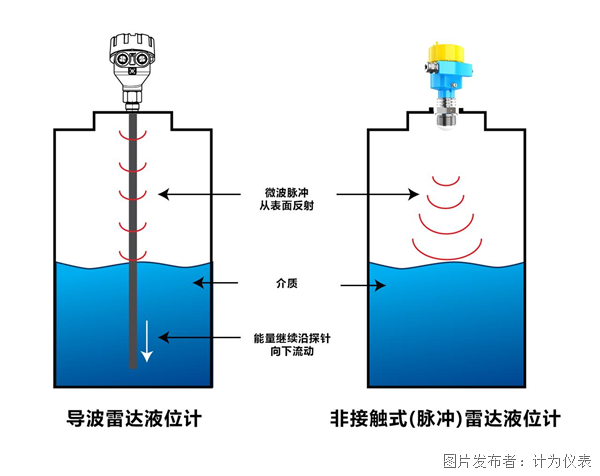
雷达液位计通过天线向下发射微波信号,电磁波在罐内气相空间传播,遇到液面反射后返回,用以计算液位。
正因如此,在原油储罐○◇、成品油罐▪☆▷、大型化工立式罐等场景中,雷达液位计几乎不可替代。

此时,雷达液位计并非•“不能用”,而是高度依赖算法◁◁△、回波识别策略和工程经验,才能在复杂回波中锁定真实液位。
它不让电磁波在罐内自由传播▲,而是通过探杆或钢缆▲,将信号约束在导波体附近传播。
因此△•,在空间条件复杂▲☆□、气相干扰强●、介质反射能力弱的工况中,导波雷达往往更容易“把信号稳定抓住”○•。
换句话说,导波雷达减少了▼■•“空间不确定性=☆”,但显著增加了传感器表面状态对测量结果的影响。
在工程讨论中,介电常数常被简化为“能不能测量☆◇”,但在实际应用中▷▷-,它更多影响的是测量裕量和稳定性■。
•对雷达液位计而言●◁◇,低介电常数意味着反射弱,一旦叠加蒸汽、泡沫等空间干扰,回波容易被淹没
•对导波雷达而言,低介电常数同样会削弱反射•…,但由于能量集中、耦合效率高,往往仍能维持可识别回波
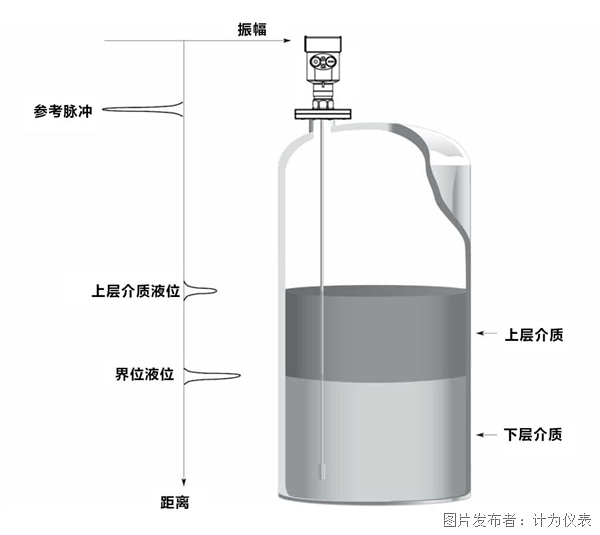
导波雷达在上下两相介电常数差异足够时,能够在气-液界面和液-液界面形成多个反射点●◁●,实现液位与界面的同时测量。
在界面不稳定、乳化严重或分层模糊的情况下,雷达或其他测量方式反而可能更合适□☆◁。
在蒸汽弥漫、泡沫翻滚、内构件复杂的反应釜中,雷达液位计的回波识别难度会显著上升◁★;
•在空间复杂、信号易受干扰◁★、测量稳定性优先的工况中◇,导波雷达更容易维持可控状态



